



"필자가 미국 도로교통안전국(NHTSA)에서 일하고 있던 2010년, 3가지 중요한 사건이 있었다. 이는 자동차에 대한 최초의 해킹, 구글 자율주행차량 프로젝트 시작, 차량 대 차량(V2V) 인프라를 활용한 기술 발전으로, 자동차와 IT의 통합이라는 방향을 제시하고 있었다.
안전성
자동차 안전과 관련해 미국에서의 차량주행거리 10만마일 당 교통사고 사망자의 수는 꾸준히 감소해서 0에 근접하고 있었으나 2015년 1.14로 높아졌고 2016년에도 10%의 증가가 예상되었다. 세계적으로는 작년 교통사고 사망자 125만 명 중 90%가 중저개발 국가에서 발생했다. WHO에 따르면 5-44세 연령대의 사망 3대원인 중 하나가 자동차 사고였으며 사고원인의 94%는 운전자 부주의에 의한 것이다. 미국에서만 이에 따른 경제적 손실이 1조 달러에 달한다.
이 때문에 자동차업계에서는 정부와 함께 충격에 잘 견디는(crashworthiness) 자동차 개발에 힘써왔다. 하지만 이제는 dynamic brake support, 충돌완화브레이크(crash imminent braking), 주행조향보조시스템(lane keeping assist system) 등 충돌회피(crash avoidance)로 방향이 바뀌고 있다. NHTSA는 22개 자동차회사들과 automatic emergency braking을 2020년까지 모든 차량에 기본사양으로 장착하기 위해 노력하고 있다.

2017서울모터쇼 국제 컨퍼런스에서 강연하는 첸 리우
V2V 커뮤니케이션을 이용하면 시야가 가리는 부분에 대한 정보도 알 수 있다. 예를 들어 커다란 트럭이 가리고 있는 경우, 보이지 않는 상태에서 조심조심 나가야하지만, 이런 정보를 사용하면 사고를 미연에 방지할 수 있게 된다. 미국 정부와 산업계는 5.9GHz 주파수대 DSRC를 표준으로 채택하여 모든 신차에 무선기능을 탑재하여, 차종이나 회사와 관계없이 안전정보를 공유할 수 있도록 역량을 집중하고 있다.
또한 차량 대 인프라(V2X) 커뮤니케이션을 사용하면 신호등, 가로등, 교량 등과의 교신을 통해 차량 운행 흐름을 개선할 수 있다. 예를 들어 새벽 2시에 아무도 없는 도로에서 빨간불이 들어오면 그대로 멈춰있어야 하지만, 신호등이 이를 인지하고 파란불로 바뀌면 원활한 운행이 가능해진다. 또, 교통신호도 다이내믹하게 관리할 수 있는데, 예를 들어 야구경기가 시작될 때는 주변 신호체계를 경기장으로 향하는 방향을 원활하게, 경기가 끝나면 나가는 쪽을 원활하게 운용할 수 있게 된다.
자동화에는 6단계가 있다. 0단계는 포드 모델 T와 같이 운전자가 모든 조작을 하는 것, 1단계는 크루즈콘트롤 또는 교통량에 따라 조정되는 어댑티브 크루즈콘트롤 기능과 같은 특정 기능만을 자동화하는 것, 2단계는 주행주향보조시스템과 어댑티브 크루즈콘트롤을 병행해서 사용하는 것처럼 특정 기능에 두 가지 이상의 자동화 기술을 사용하는 것이다. 3단계는 운전자가 모니터하지 않다가 필요한 경우에만 개입하는 것으로 운전자의 인지, 반응 시간 등 아직 논란의 대상이 되고 있으며, 4단계는 스티어링과 페달이 없어도 될 정도로 운전자의 개입이 없어지는 단계이다. 하지만 눈 위에서는 차선을 인식할 수 없어 사용할 수 없다는 단점이 있으며, 5단계는 아무런 제한 없이 자동화기능을 사용할 수 있는 단계이다. 자동화의 궁극적인 목표는 4, 5단계가 되겠다. 여기에 사용되는 기술은 GPS, 초음파센서, 휠스피드센서, 레이다센서, 비디오캠, Lidar, 그리고 중앙컴퓨터 등이다.
V2V 커뮤니케이션을 이용하면 시야가 가리는 부분에 대한 정보도 알 수 있다. 예를 들어 커다란 트럭이 가리고 있는 경우, 보이지 않는 상태에서 조심조심 나가야하지만, 이런 정보를 사용하면 사고를 미연에 방지할 수 있게 된다. 미국 정부와 산업계는 5.9GHz 주파수대 DSRC를 표준으로 채택하여 모든 신차에 무선기능을 탑재하여, 차종이나 회사와 관계없이 안전정보를 공유할 수 있도록 역량을 집중하고 있다.
또한 차량 대 인프라(V2X) 커뮤니케이션을 사용하면 신호등, 가로등, 교량 등과의 교신을 통해 차량 운행 흐름을 개선할 수 있다. 예를 들어 새벽 2시에 아무도 없는 도로에서 빨간불이 들어오면 그대로 멈춰있어야 하지만, 신호등이 이를 인지하고 파란불로 바뀌면 원활한 운행이 가능해진다. 또, 교통신호도 다이내믹하게 관리할 수 있는데, 예를 들어 야구경기가 시작될 때는 주변 신호체계를 경기장으로 향하는 방향을 원활하게, 경기가 끝나면 나가는 쪽을 원활하게 운용할 수 있게 된다.
자동화에는 6단계가 있다. 0단계는 포드 모델 T와 같이 운전자가 모든 조작을 하는 것, 1단계는 크루즈콘트롤 또는 교통량에 따라 조정되는 어댑티브 크루즈콘트롤 기능과 같은 특정 기능만을 자동화하는 것, 2단계는 주행주향보조시스템과 어댑티브 크루즈콘트롤을 병행해서 사용하는 것처럼 특정 기능에 두 가지 이상의 자동화 기술을 사용하는 것이다. 3단계는 운전자가 모니터하지 않다가 필요한 경우에만 개입하는 것으로 운전자의 인지, 반응 시간 등 아직 논란의 대상이 되고 있으며, 4단계는 스티어링과 페달이 없어도 될 정도로 운전자의 개입이 없어지는 단계이다.
하지만 눈 위에서는 차선을 인식할 수 없어 사용할 수 없다는 단점이 있으며, 5단계는 아무런 제한 없이 자동화기능을 사용할 수 있는 단계이다. 자동화의 궁극적인 목표는 4, 5단계가 되겠다. 여기에 사용되는 기술은 GPS, 초음파센서, 휠스피드센서, 레이다센서, 비디오캠, Lidar, 그리고 중앙컴퓨터 등이다.
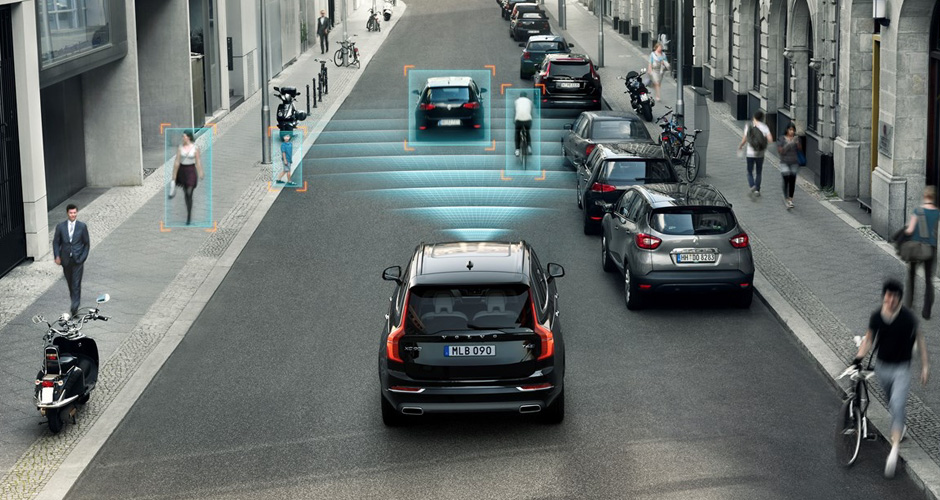
crash avoidance
Lidar(light detection and ranging)는 10여 년 전부터 자동차에서 사용하기 시작한 첨단기술로, 광파를 내보내서 주차된 자동차, 가로수, 움직이는 보행자 등과 같은 주변 물체를 인식하는 것이다. 이런 정보를 종합해서 주행에 사용하게 된다. 자율주행을 위해서는 10cm 단위까지 정확한 고해상도지도가 필수이나 이런 정보를 축적하는 것은 상당한 노력이 필요한 것이다. 그런 이유로 얼마 전에 독일의 메르세데스 다임러, 폭스바겐 3사가 한국의 mapping회사를 인수하기로 결정하기도 했다.
4, 5단계의 자동화가 달성되면 시각장애인의 주행도 가능해진다. 그 시기로 포드는 2021년에는 자율주행차량을 양산한다고 발표한 바 있고, 다른 회사들도 비슷한 시기를 예상하고 있다. 미국 오바마 대통령은 지난해에 자율주행 자동차에 많은 힘를 실어주며 “나의 임기 8년동안 자율주행 차량은 공상과학 영화에나 나올 대상에서 이제는 현실로 다가왔다”고 말하기도 했다. NHTSA도 연방 자율주행차량 정책 지침을 내 놓은바 있으며 그 내용은 1부-15항목의 업계용 안전평가, 2부-주정부 정책, 3부-현재의 규제도구, 4부-향후 가능한 규제도구 등으로 이루어져 있다.
지속가능성
VMT(차량주행거리)는 계속 증가하고 있으며, 가솔린 엔진에 대한 의존성은 지금과 같이 지속될 것 같지 않다. 2040년이 되면 판매된 신차의 대부분은 BEV 또는 PHEV일 것으로 전망되고 있다. 2015년 전기차 판매는 이미 100만대를 돌파 했다. 또한 BEV의 수요도 꾸준히 늘어나고 있으며 자동화의 궁극적인 목표는 4, 5단계가 되겠다.
편리성
현재 자동차 활용도에 대해 생각해 보면, 자동차는 전체 시간의 95%는 주차된 상태로 있다. 또한 주차 문제도 심각해서 UCLA의 연구결과에 따르면 샌프란시스코의 교통량 중 30%가 주차공간을 찾는 차량으로 조사되었다.
이 문제에 대해 카셰어링이 좋은 해법을 제시하고 있는데, 낮은 사용률 문제를 해결하는 동시에 구입비용, 보험료, 유지비, 연료비 등을 아낄 수 있으며 사용한 시간만큼만 돈을 지불한다는 장점이 있다. 이런 장점을 감안하여 자동차회사들도 이 분야에 진출하고 있는데 GM Maven 서비스는 스마트폰에서 원하는 차량을 선택 사용할 수 있는 서비스이다.
글로벌 카셰어링 시장도 점검 커지고 있다. 아시아에 230만 명, 유럽은 210만 명의 사용자가 있으며, 미국은 인구밀도가 낮고 대도시가 많지 않아 상대적으로 그 숫자가 적다. 카셰어링의 중요한 요건은 경제성인데 차량 사용률이 작을 경우 더욱 경제적 이다. 일반적으로 1년 주행거리가 16,000km 미만인 63%의 인구에게는 카셰어링이 더 경제적일 수 있다.
현재 자동차 활용도에 대해 생각해 보면, 자동차는 전체 시간의 95%는 주차된 상태로 있다. 또한 주차 문제도 심각해서 UCLA의 연구결과에 따르면 샌프란시스코의 교통량 중 30%가 주차공간을 찾는 차량으로 조사되었다.
이 문제에 대해 카셰어링이 좋은 해법을 제시하고 있는데, 낮은 사용률 문제를 해결하는 동시에 구입비용, 보험료, 유지비, 연료비 등을 아낄 수 있으며 사용한 시간만큼만 돈을 지불한다는 장점이 있다. 이런 장점을 감안하여 자동차회사들도 이 분야에 진출하고 있는데 GM Maven 서비스는 스마트폰에서 원하는 차량을 선택 사용할 수 있는 서비스이다.
글로벌 카셰어링 시장도 점검 커지고 있다. 아시아에 230만 명, 유럽은 210만 명의 사용자가 있으며, 미국은 인구밀도가 낮고 대도시가 많지 않아 상대적으로 그 숫자가 적다. 카셰어링의 중요한 요건은 경제성인데 차량 사용률이 작을 경우 더욱 경제적 이다. 일반적으로 1년 주행거리가 16,000km 미만인 63%의 인구에게는 카셰어링이 더 경제적일 수 있다.

라이드셰어링 시장에서의 주요업체는 우버, 리프트, 디디추싱(중국), 올라(인도) 등이며, 이 분야에서의 특이한 서비스는 캐딜락의 회원제 서비스인 Book이 있다. 회원은 일정 회비를 지불하면 캐딜락 차종중 어느 것이든 원하는 기간 동안 사용할 수 있는 서비스이다. 비즈니스 모델을 비교하자면 비디오 대여점이었던 블록버스터와 일정액을 지불하고 무제한 영화를 볼 수 있는 온라인 서비스인 넷플릭스를 떠올리게 된다. 특히 운전면허가 없는 젊은층을 대상으로 이런 회원제 프로그램이 가능할 것이며 물론 초기에는 mapping의 제한으로 인해 geofenced 환경, 즉, 일정지역에서만 제공될 것이며, 밀집한 대도시 위주로 발전하게 될 것이다.
스마트폰은 보급률 50%를 달성하는데 10년이 걸렸으나, 자율주행차량 보급률이 50% 넘는 시점은 컬러TV와 비슷한 15년 정도가 될 것으로 보인다. 라이드셰어링이 1마일당 35-40센트 정도의 경제성을 가지게 되면 차량을 소유하는 것보다 확실히 경제적이 될 것이다. 이 시점이 되면 자율주행차량과 필요시에만 사용하는 라이드셰어링과 전기차가 서로 상호의존적으로 발전하게 될 것이다.
라이드셰어링의 증가는 전기차에 대한 수요를 증가시키고, 이는 비용감소로 이어질 것이다. 또, 자율주행차량의 발전은 안전도 개선을 통해 차량내 안전도 관련 부품의 숫자를 줄이고 이는 자동차의 경량화로 이어져 전기차의 효율을 개선하는 효과가 있다. 이를 통해 주차면적은 줄어드는 대신 녹지가 늘어나며, 원하는 곳으로 차량을 이동시키고 사용후에도 주차할 필요가 없어진다. 즉 95%는 가만히 서있는 자동차를 소유하고 있을 필요가 없는 사뭇 다른 도시 환경이 가능해 질 것이다.
- 첸 리우(Chan Lieu)
- 첸 리우
(Chan Lieu) - Venable LLP 선임고문


-
자동차의 미래, 패러다임의 변화
개인 이동수단의 미래


-
자동차의 미래, 패러다임의 변화
자동차산업의 새로운 패러다임, 더 편리하고 지속가능하며 안전한 자동차